加工プログラム作成・干渉シミュレーションソフト
アニメーションによる加工の可否のシミュレーションおよびM/Tの算出を可能にする当社開発のソフトウェア。
実機とのプログラム差異を低減する補正機能によりより精度の高いシミュレーションを実現。
完成したデータプログラムを実機に転送入力する事でプログラム作成に要する工数を大幅に削減。
ロボアームシリーズ用と3Dベンダシリーズ用をラインナップしています。
資料ダウンロード
丸昭機械の概要をお伝えする資料から、詳しい活用法まで幅広く資料をご用意しております。
ぜひ一度ご覧ください。
ロボアーム プログラムジェネレーター
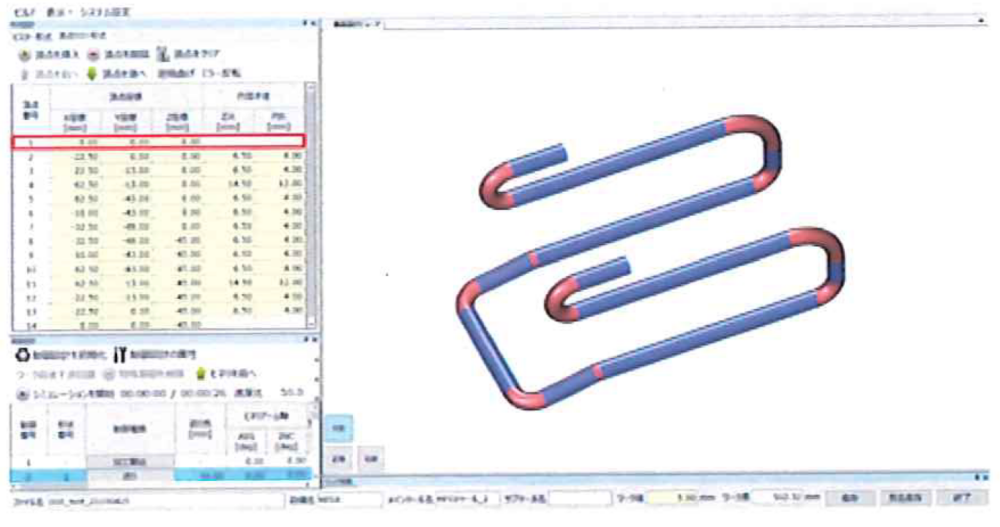
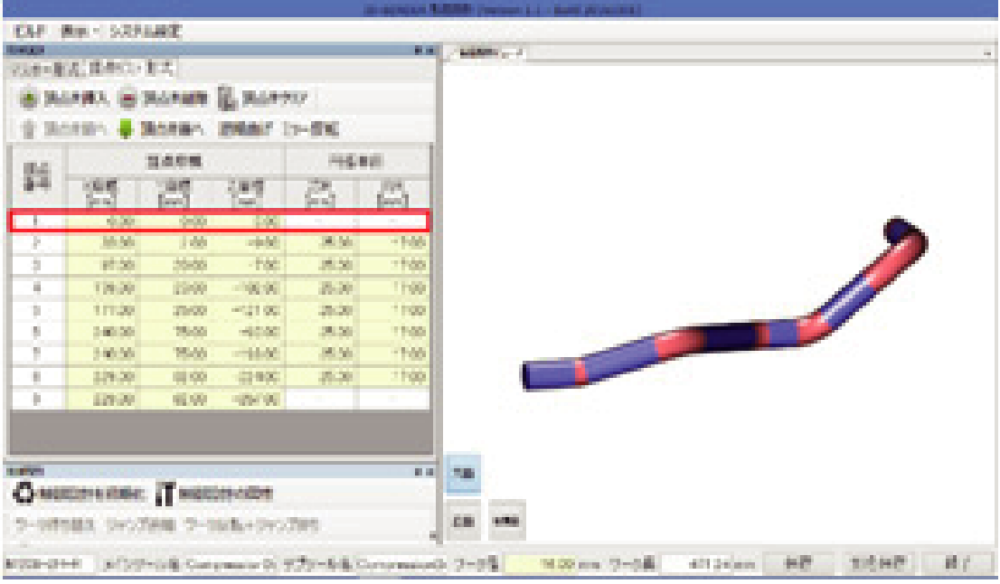
STEP 1:加工する形状の「三次元交点座標」を入力。
①形状設計の「頂点リスト形式」にX・Y・Z座標値入力。
※CADデータ(IGES 形式)からの直接入力も可能。
②座標値を入力すれば加工形状が表示されます。
※形状図は拡大・縮小、回転、移動など自在。
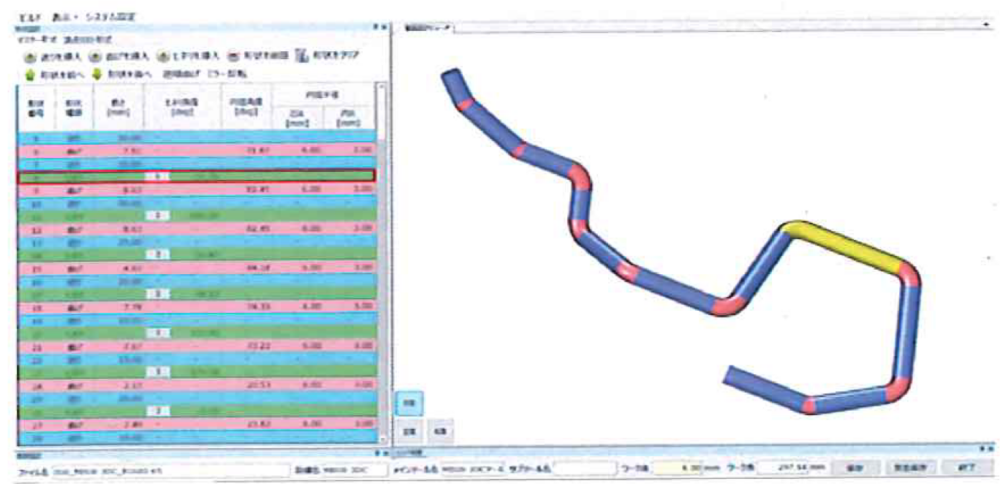
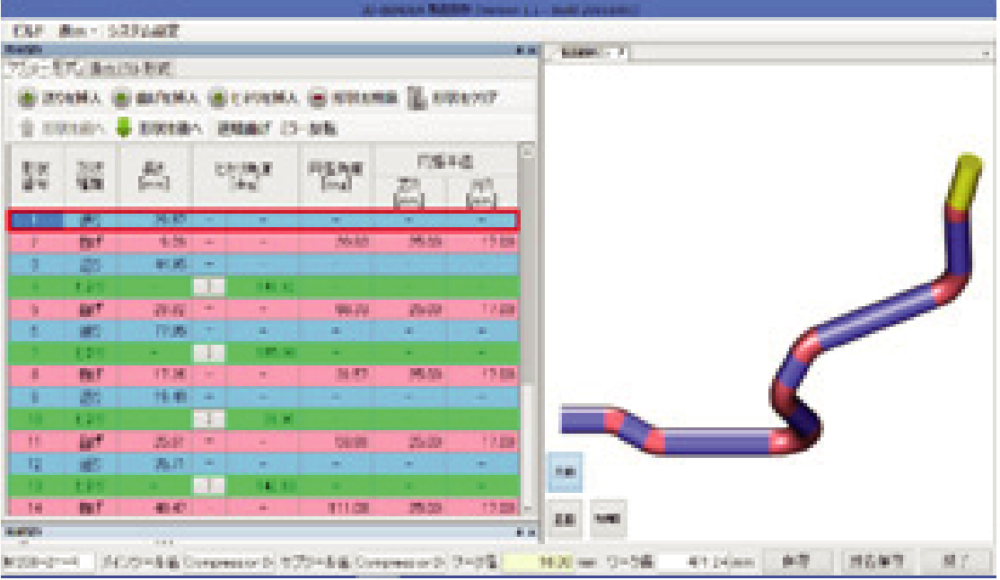
STEP 2:「頂点リスト形式」から「マスター形式」にデータ演算。
① X・Y・Z座標データを曲げデータ(送り・ヒネリ・曲げ)に変換。
② 演算は逆順曲げ・ミラー反転の指定も可能。
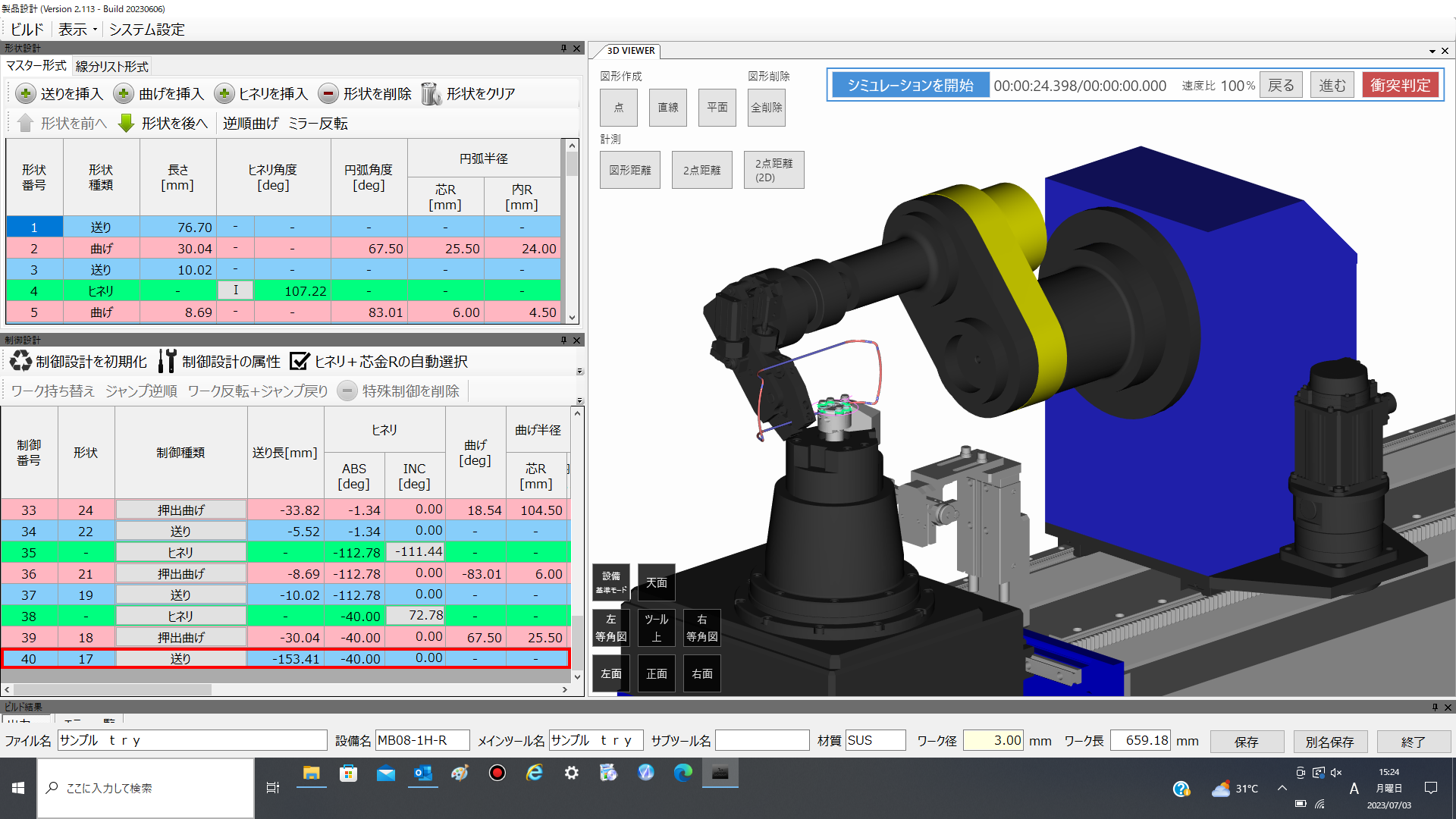
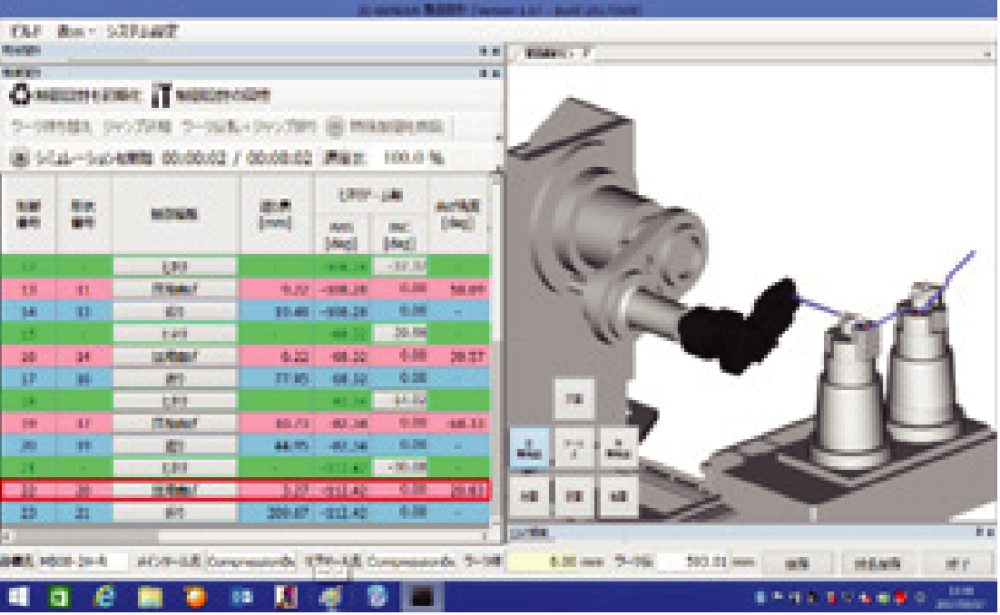
STEP 3:動作指定・干渉チェックにより実際の加工データ生成。
① 3Dアニメーション画像で詳細な干渉チェックを実現。
※客先仕様に対するカスタマイズ化の対応可能。
② 全ての曲げ加工方式に変換して入力可能。
(押曲げ・引曲げ・2回曲げ・多角曲げ・プッシュベンド等)
③ 完成したデータプログラムを実機に転送入力。
→実機で作成したデータの曲げ加工を実現。
3Dベンダー プログラムジェネレーター
STEP 1:加工する形状の「三次元交点座標」を入力。
① 形状設計の「頂点リスト形式」にX・Y・Z 座標値入力
※CADデータ(IGES 形式)からの直接入力も可能。
②座標値を入力すれば加工形状が表示されます。
※形状図は拡大・縮小、回転、移動など自在。
STEP 2:「頂点リスト形式」から「マスター形式」にデータ演算。
① X・Y・Z 座標データを曲げデータ(送り・ヒネリ・曲げ)に変換。
② 演算は逆順曲げ・ミラー反転の指定も可能。
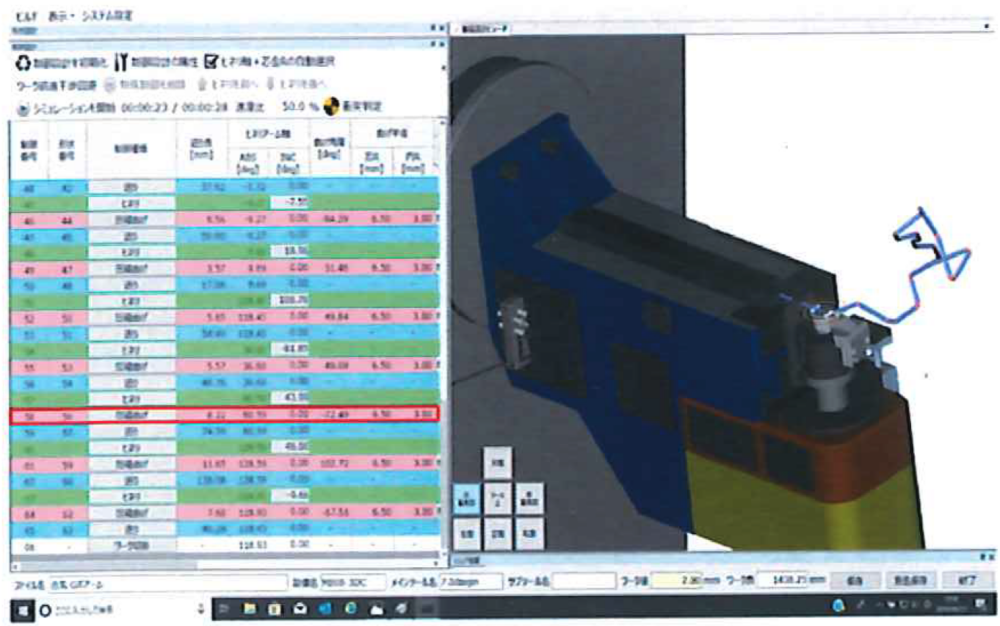
STEP 3:動作指定・干渉チェックにより実際の加工データ生成。
① 3Dアニメーション画像で詳細な干渉チェックを実現。
※客先仕様に対するカスタマイズ化の対応可能。
②全ての曲げ加工方式に変換して入力可能。
(押曲げ・引曲げ・2回曲げ・多角曲げ・プッシュベンド等)
③完成したデータプログラムを実機に転送入力。
→実機で作成したデータの曲げ加工を実現。